Key Features of Rampa
Abstract—As robotics continue to enter various sectors beyond traditional industrial applications, the need for intuitive robot training and interaction systems becomes increasingly more important. This paper introduces Robotic Augmented Reality for Machine Programming (Rampa), a system that utilizes the capabilities of state-of-the-art and commercially available AR headsets, e.g., Meta Quest 3, to facilitate the application of Programming from Demonstration (PbD) approaches on industrial robotic arms, such as Universal Robots UR10. Our approach enables in-situ data recording, visualization, and fine-tuning of skill demonstrations directly within the user’s physical environment. Rampa addresses critical challenges of PbD, such as safety concerns, programming barriers, and the inefficiency of collecting demonstrations on the actual hardware. The performance of our system is evaluated against the traditional method of kinesthetic control in teaching three different robotic manipulation tasks and analyzed with quantitative metrics, measuring task performance and completion time, trajectory smoothness, system usability, user experience, and task load using standardized surveys. Our findings indicate a substantial advancement in how robotic tasks are taught and refined, promising improvements in operational safety, efficiency, and user engagement in robotic programming.
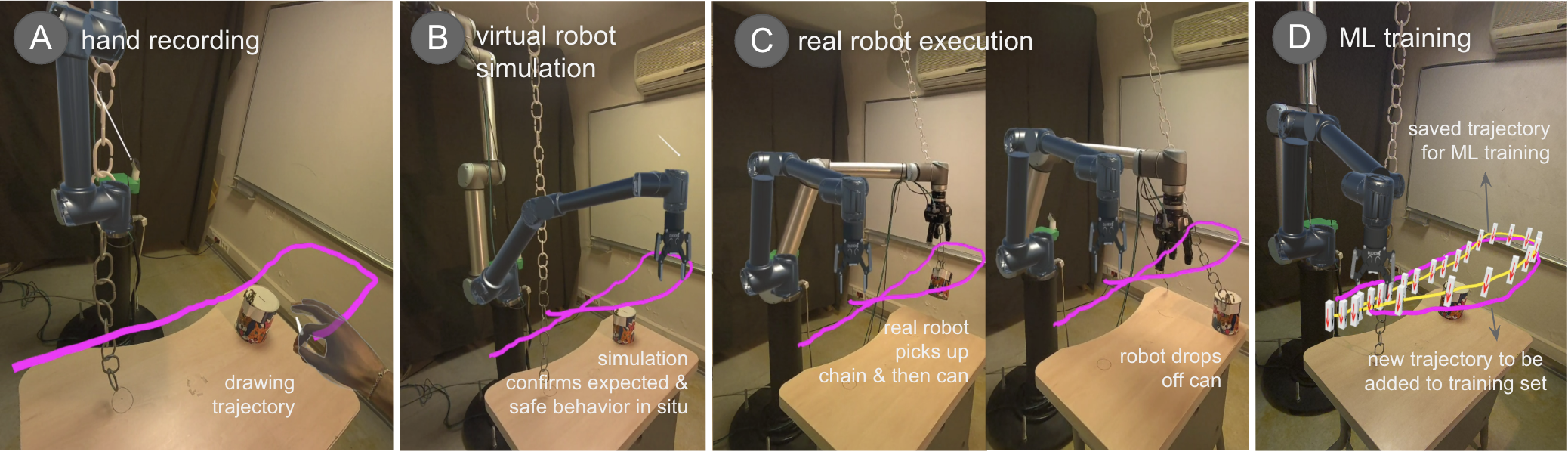
Users use AR to demonstrate skills, capturing the data directly in the user's environment, using hand pinch, as shown in the figure above. Compared to traditional methods, such as the kinesthetic control, RAMPA simplifies the collection of demonstration trajectories, an integral component of PbD procedures, offering a more efficient experience for robotic programmers.
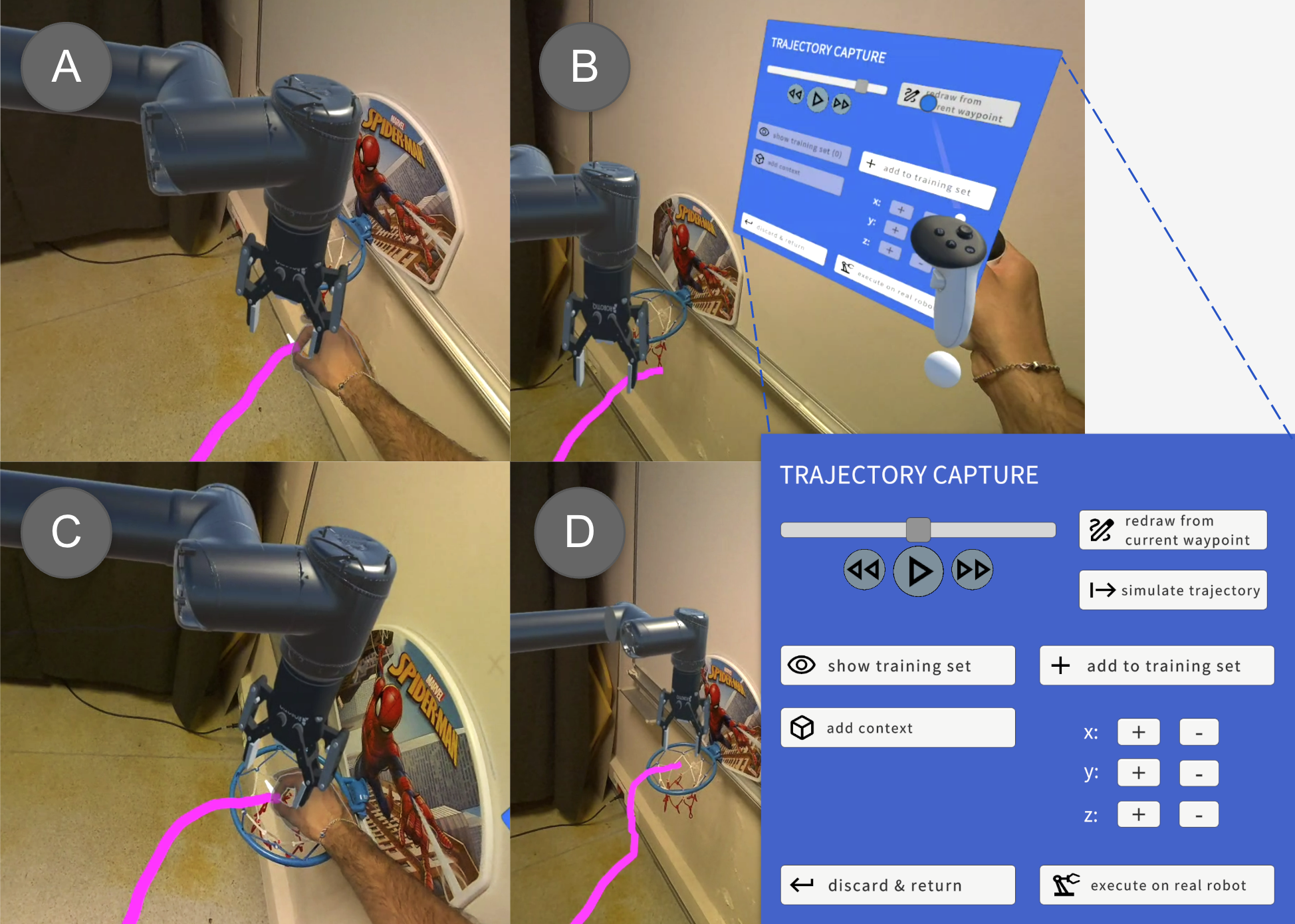
The system allows users to visualize and modify the movements of a virtual robot before these movements are executed
on the actual robotic arm. This step ensures that potential errors can be corrected in a safe, virtual space.
Moreover, the ability to adjust any portion of demonstration trajectories increases the operator's overall performance.
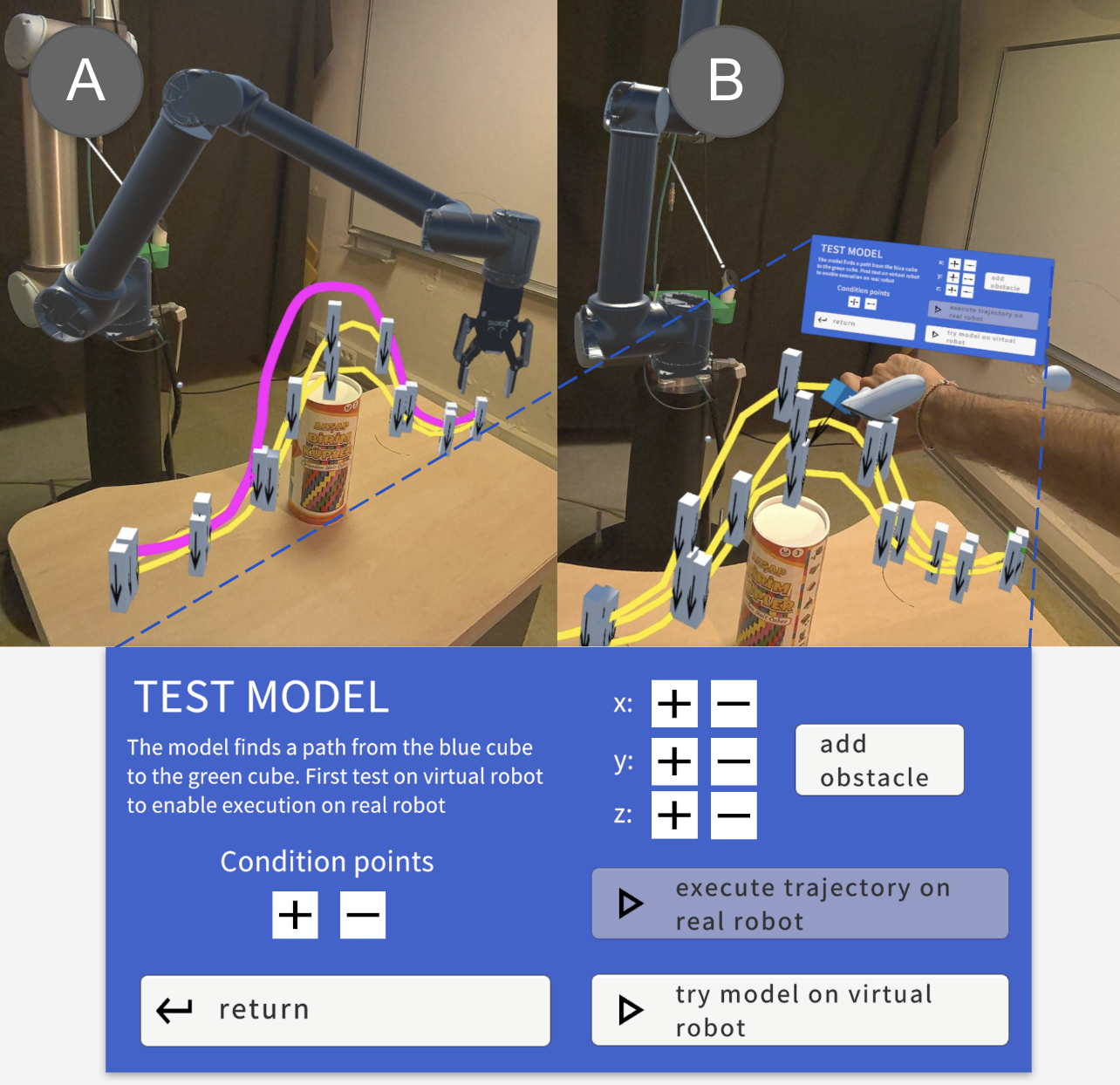
Utilizing the collected data, popular PbD models, such as Probabilistic Movement Primitives (ProMPs), can be trained and validated
within the AR environment. Users can observe the generated trajectories in real-time, ensuring the robot's behavior aligns with desired outcomes.
@ARTICLE{dogangun2024rampa,
author={Dogangun, Fatih and Bahar, Serdar and Yildirim, Yigit and Temir, Bora Toprak and Ugur, Emre and Dogan, Mustafa Doga},
journal={IEEE Robotics and Automation Letters},
title={RAMPA: Robotic Augmented Reality for Machine Programming by DemonstrAtion},
year={2025},
volume={10},
number={4},
pages={3795-3802},
keywords={Robots;Trajectory;Training;Hands;Robot programming;Data models;Real-time systems;Augmented reality;User experience;Human-robot interaction;Virtual reality and interfaces;learning from demonstration;augmented reality (AR);extended reality (XR)},
doi={10.1109/LRA.2025.3546109}}